Department of Earth Sciences
Service Navigation
Machine coregistration of large heterogeneous datasets of planetary surfaces for the systematic generation of global image and topography models
Within the framework of the project "Koregistrierung" members of the Planetary and Remote Sensing group create global image and topography models of planetary surfaces. Methods from the fields of "Big Data" and Artificial Intelligence will enable the large-volume and automatic merging of individual images into coherent mosaics.
A critical problem during data processing is the inadequate positional accuracy, thus the exact positioning of the respective image on the planet. The image position is determined by ray tracing from the position and orientation of the respective camera on the spacecraft to the planet's surface. Due to the large distance of the camera to the planet, smallest deviations of these camera orientations result in positional errors of up to several hundred pixels, relative to the map-projected image product. If two adjacent images are to be connected with each other, this has an effect in the form of geometric offsets, as well as the absence or duplication of mapped features of the surface. Relatively to each other several images can be co-aligned by finding common pixels - but since there is no ground control on extraterrestrial celestial bodies, a reference dataset must be used to determine the absolute position of the image – the data will be coregistered to each other.
For Mars, the Digital Terrain Model (DTM) of the Mars Orbiter Laser Altimeter (MOLA) Experiment on the Mars Global Surveyor (MGS) probe has been established for this use, because a laser altimeter has a very high positional accuracy and is available almost globally for the planet. However, this data set has only a low lateral spatial resolution of 463 m/px at the equator. At the poles the resolution is slightly better with 116 m/px. Because of these large differences in resolution (about two orders of magnitude in the case of CTX), this relative ground control using MOLA is always limited. To counteract this, it is common to use an image dataset registered to MOLA, but the problems remain.
In contrast to this, the global HRSC mosaic products consist in each case of a common set of pixel-precise overlaid DTM (50 m/px) and orthoimage (12.5 m/px), both of which are already anchored to MOLA with DTM accuracy. Due to the photogrammetric capabilities of a 5-times stereo camera an improvement of the DTM resolution of one order of magnitude compared to MOLA is achieved. For this reason, the combination of the DTM and image mosaic is the ideal dataset to improve the other high-resolution camera data in their positional accuracy on the planet and to avoid geometric overlaps. Furthermore, the images must be orthorectified using a DTM to correct the image distortions due to the imaging perspective. The quality of the rectification depends significantly on the resolution and accuracy of the DTM. HRSC mosaics will soon be available in global coverage. These HRSC mosaics are optimally suited for the correction of the positional accuracy as well as the geometric orthorectification due to the pixel-precise overlay of DTM and image mosaic and their controlled alignment to MOLA.
→
There are currently three active high-resolution camera systems in orbit around Mars whose data are freely available: The Context Imager (CTX), the High Resolution Imaging Science Experiment (HiRISE), and the Colour & Stereo Surface Imaging System (CaSSIS). Images from these systems are available as individual images, but not as contiguous mosaics. Because of CTX's near-global coverage, the data is ideal for generating high-resolution image mosaics. In contrast, the HiRISE camera images will not achieve global coverage, but because of their very high resolution, they will show much finer detail at the available locations. The CaSSIS data are comparable in resolution to CTX and have their own color channels. Official image mosaics are already being processed for the High Resolution Stereo Camera (HRSC).Data
| Camera | Mission | Resolution | Mission age | # Scenes | Coverage |
| CTX | MRO | 6.0 m/px | 15 Jahre | 119.030 | 98 % |
| HiRISE | MRO | 0.3 m/px | 15 Jahre | 137.400 | 3 % |
| CaSSIS | TGO | 4.6 m/px | 4 Jahre | 20.000 | n.a. |
| HRSC | MEx | 12.5 m/px | 18 Jahre | 24.528 | 99 % |
MRO: Mars Reconnaissance Orbiter
TGO: ExoMars Trace Gas Orbiter
MEx: Mars Express
Koregistrierung
←
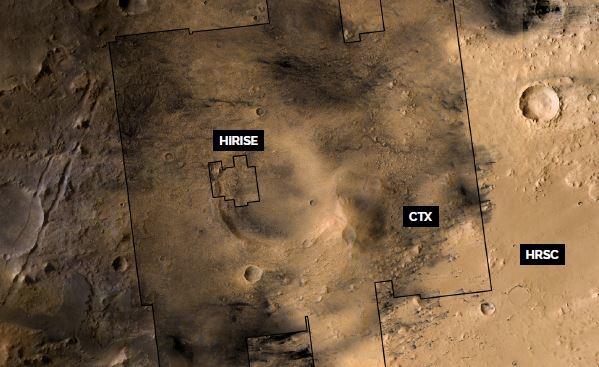
An application for combining congruently overlaying heterogeneous data sets is the pan sharpening of lower-resolution multispectral data with higher-resolution panchromatic data. In this process, the color information of the HRSC channels is transferred to the higher resolution data sets via color space transformation - CTX itself has no color channels of its own and HiRISE has only very narrow ones. This picture shows a mosaic of four HiRISE single images, coregistered to a CTX mosaic of 12 single images, which was coregistered to the HRSC mosaic.
HRSC Mosaics || Press Releases
The Department of Planetary Sciences and Remote Sensing offers HRSC mosaics for download in a webGIS. In addition, images taken with the HRSC stereo camera from Mars are regularly published as press releases together with DLR and ESA.

PARTICIPANTS FUNDED BY THE PROJECT
- Prof. Dr. Frank Postberg (project leader)
- Sebastian Walter (scientific and technical leader)
- Prof. Dr. Ralf Jaumann
- Dr. Michael Aye
- Robert Munteanu
- Alicia Neesemann
- Wilhelm Zuschneid
- Björn Schreiner
- Dr. Gregory Michael (extern)
FINANCIAL SUPPORT • PROJECT FUNDING
- Project ID: 50 OO 2204