Fachbereich Geowissenschaften
Service-Navigation
Deuteronilus Cavus – ein kaum wiedererkennbarer Einschlagskrater
Bilddaten, die von der hochauflösenden Stereokamera (HRSC) an Bord der ESA-Mission Mars Express aufgenommen wurden, zeigen eine große Senke, welche durch verschiedene geologische Prozesse verändert wurde. Die HRSC ist ein Kameraexperiment, das vom Deutschen Zentrum für Luft- und Raumfahrt (DLR) entwickelt wurde und betrieben wird.
Deuteronilus Cavus • Position & 3D Ansichten

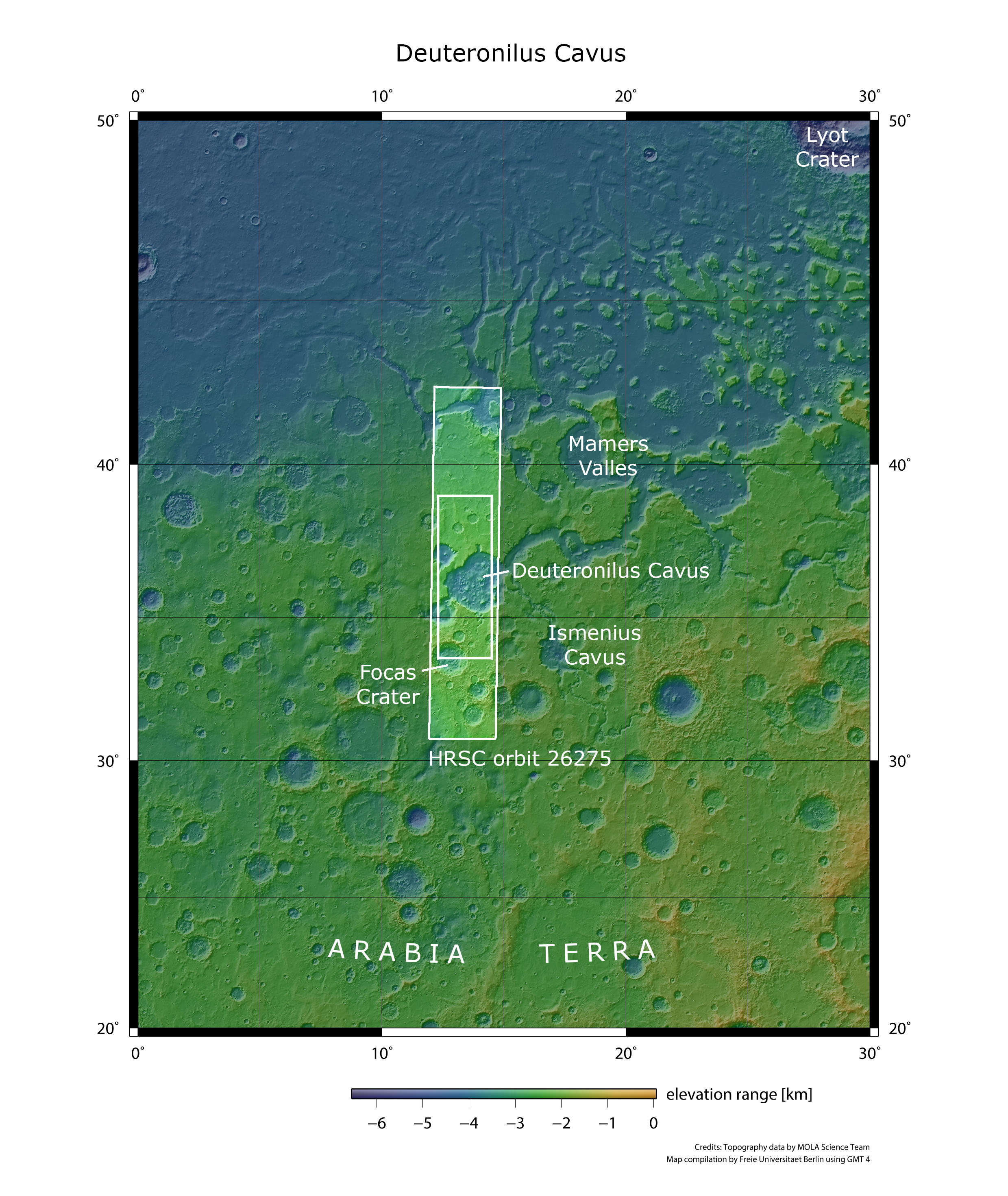
Deuteronilus Cavus - Übersichtskarte
Bildquelle: MOLA Science Team/FU Berlin

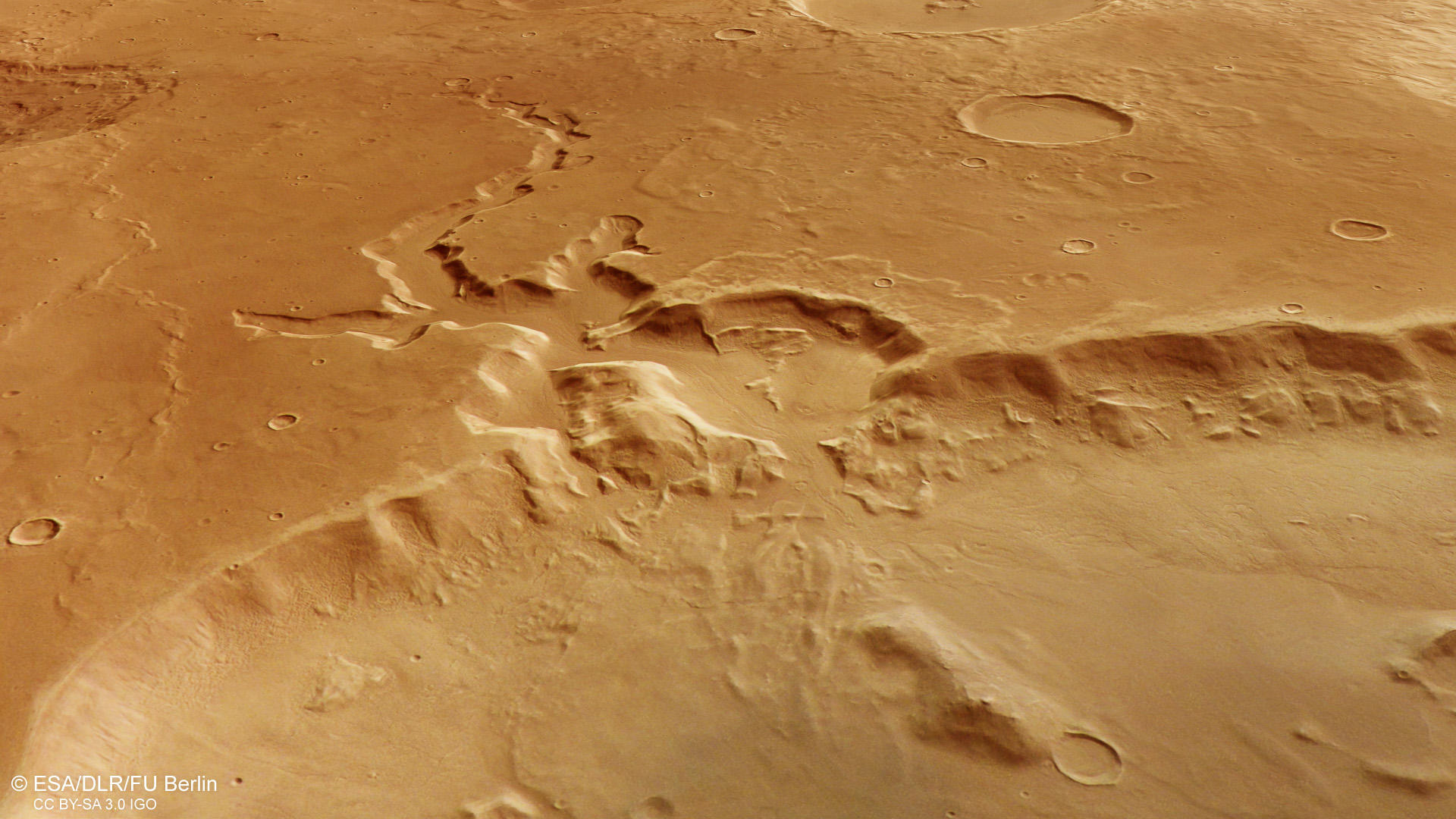
Deuteronilus Cavus - 3D 1
Bildquelle: ESA/DLR/FU Berlin

Deuteronilus Cavus - 3D 2
Bildquelle: ESA/DLR/FU Berlin

Deuteronilus Cavus - 3D 3
Bildquelle: ESA/DLR/FU Berlin
Deuteronilus Cavus • HRSC Ansichten

Deuteronilus Cavus - HRSC Farbcodierstes Höhenmodell
Bildquelle: ESA/DLR/FU Berlin

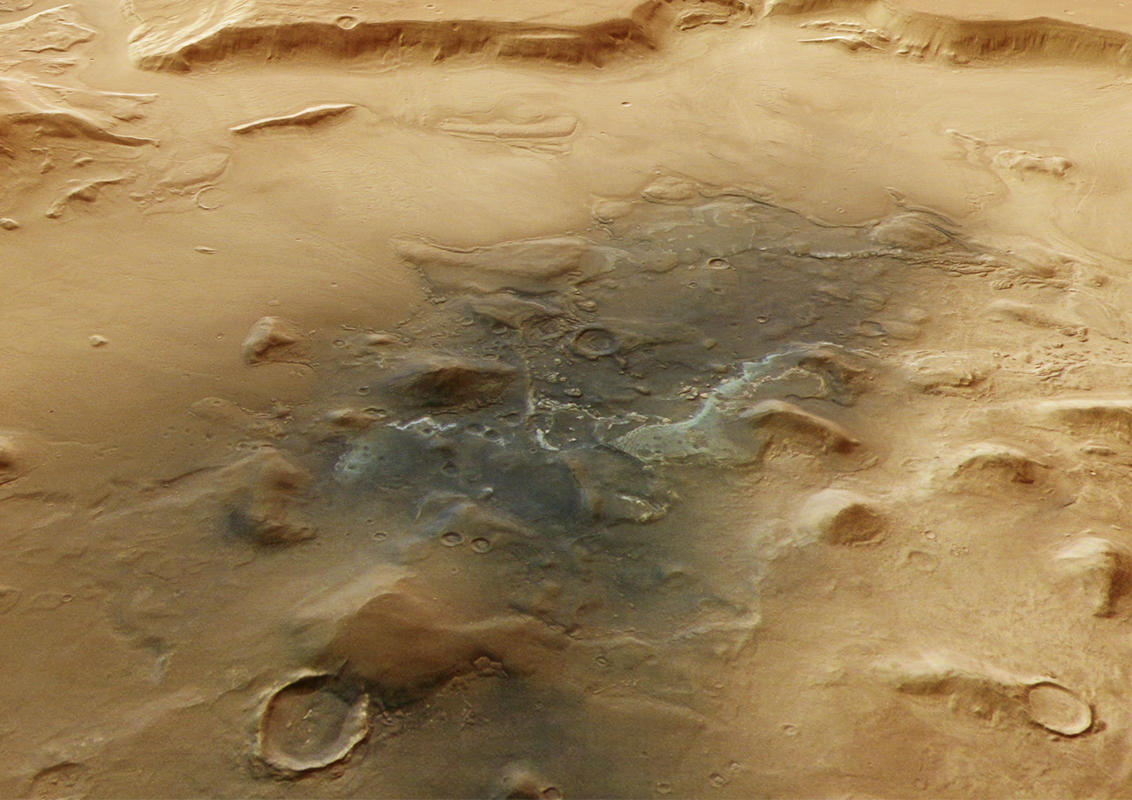
Deuteronilus Cavus - HRSC Farbaufsicht
Bildquelle: ESA/DLR/FU Berlin

Deuteronilus Cavus - HRSC Beschriftung
Bildquelle: ESA/DLR/FU Berlin

Deuteronilus Cavus - HRSC Anaglyphe
Bildquelle: ESA/DLR/FU Berlin
Ein kaum wiedererkennbarer EInschlagskrater
Deuteronilus Cavus ist eine etwa 120 Kilometer große Senke im nördlichen Teil der Region Arabia Terra. Der Name Deuteronilus stammt aus dem Griechischen und bedeutet „zweiter Nil“ – eine Anspielung auf das nahegelegene Talsystem Mamers Valles im Nordosten von Deuteronilus Cavus. Mamers Valles erstreckt sich über mehr als 1.000 Kilometern – vom südlichen Hochland bis ins nördliche Tiefland. Die Umgebung von Deuteronilus Cavus wird als sogenanntes „fretted terrain“ bezeichnet, einem englischen Begriff, der auf intensive Erosionsprozesse zwischen Hoch- und Tiefland hinweist. Diese Übergangszone ist durch eine Vielzahl von Hügeln, Tafelbergen, verzweigten Tälern und Senken geprägt. Geologisch ist Deuteronilus Cavus besonders interessant, da das Gebiet sowohl alte Strukturen aus der Noachischen Periode als auch jüngere Ablagerungen aus der Amazonischen Periode aufweist.
Die nahezu kreisförmige Form der Senke deutet auf einen Ursprung als Einschlagskrater hin, der aus der Noachischen Periode stammt. Im Laufe der Zeit wurde der Krater durch glaziale und fluviale Prozesse stark erodiert, wodurch sich seine ursprüngliche Größe nahezu verdoppelt hat. Deuteronilus Cavus ist umgeben von sehr altem, kraterübersäten Hochland. Zu den markanten geologischen Merkmalen der Umgebung zählen unter anderem der etwa 75 Kilometer große Focas-Krater im Südwesten, sowie "wrinkle ridges", die sich über das alte Terrain erstrecken. "Wrinkle Ridges" sind die Folge abgekühlter und kontrahierter Lavaflüsse und deuten auf eine spätere Phase vulkanischer Aktivität in der Region hin.
Die Umgebung der Senke bietet ebenfalls ein abwechslungsreiches Erscheinungsbild: Kleine und große Krater (wie etwa der 75 Kilometer große Krater Focas im Südwesten) und Runzelrücken (engl. wrinkle ridges) prägen das Terrain. Letztere sind ein Hinweis auf Lavaströme, die sich abgekühlt und zusammengezogen haben. Während das umliegende Gelände auf die Noachische Periode zurückgeht, weist die Senke selbst mehrere Merkmale auf, die auf eine jüngere geologische Aktivität hinweisen. Die HRSC-Bilder zeigen, dass der Kraterrand in einigen Bereichen eingeschnitten ist. Vor allem im südlichen Teil der Senke sind verzweigte Kanäle (engl. channel branches) zu sehen, die durch den Austritt von Grundwasser an die Oberfläche entstanden sind.
Entlang der Kraterwand sind Fließmuster zu beobachten. Diese Strukturen werden oft als Blockgletscher interpretiert, die aus eisreichem Material bestehen, das von einer schützenden Gesteinsschicht bedeckt ist. Verschwindet das Eis durch Sublimation (Verdampfen) in die Atmosphäre, bleiben Schuttablagerungen mit Fließmustern zurück. Sie sind ein typisches Landschaftsphänomen in den mittleren Breiten des Mars. Es wird angenommen, dass sie auf die Amazonische Periode zurückgehen, als die Neigung der Mars-Drehachse größer war und diese Regionen von der Sonne weggeneigt waren. Die sich daraus ergebenden klimatischen Bedingungen haben die Ansammlung von Eis auch in mittleren Breiten und nicht nur in der Nähe der Pole ermöglicht.
Inmitten der Senke zeigt die Landschaft eine Mischung aus Hügeln, Tafelbergen und Ebenen, teilweise von Schuttablagerungen umschlossen. Bei den kleinen Hügeln und Tafelbergen könnte es sich um Überreste einer ehemals durchgängigen Oberfläche handeln, die nach und nach abgetragen wurde, zurückgeblieben sind diese „Inselberge“.
Im Zentrum der Senke ist dunkleres Oberflächenmaterial sichtbar, das wahrscheinlich aus verwehten Sanden vulkanischem Ursprungs besteht. Bei der Spektralanalyse der helleren Ablagerungen im Kraterboden wurden auch Schichtsilikate festgestellt, Tonminerale, die sich typischerweise durch Umwandlung von Vulkanasche oder -gestein unter Wassereinfluss bilden. Auch dies ist ein weiterer Hinweis darauf, dass Wasser in dieser Region einst eine prägende Rolle spielte.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
High Resolution Stereo Camera (HRSC)
Die Bilder wurden mit HRSC (High Resolution Stereo Camera) am 25.10.2024 während Mars Express Orbits 26275 aufgenommen. Die Auflösung der Oberfläche beträgt circa 18 meter pro pixel und das Bild ist zentriert bei circa 14° Ost and 36° Nord. Die Farbaufsicht wurde aus dem senkrecht auf die Marsoberfläche gerichteten Nadirkanal und den Farbkanälen der HRSC erstellt, die perspektivische Schrägansicht wurde aus den Geländemodell-Daten, den Nadir- und Farbkanälen der HRSC berechnet. Das Anaglyphenbild, das bei Betrachtung mit einer Rot-Blau- oder Rot-Grün-Brille einen dreidimensionalen Eindruck der Landschaft vermittelt, wurde aus dem Nadirkanal und den Stereokanälen abgeleitet. Die in Regenbogenfarben kodierte Aufsicht beruht auf einem digitalen Geländemodell (DTM) der Region, von dem sich die Topographie der Landschaft ableiten lässt.
Die HRSC-Kamera wurde am Deutschen Zentrum für Luft- und Raumfahrt (DLR) entwickelt und wird von dort betrieben. Die systematische Prozessierung der Kameradaten erfolgte am DLR-Institut für Planetenforschung in Berlin-Adlershof. Mitarbeiter der Fachrichtung Planetologie und Fernerkundung der Freien Universität Berlin erstellten daraus die hier gezeigten Bildprodukte.
Um bereits veröffentlichte Rohbilder und DTMs der Region im GIS-kompatiblen Format herunterzuladen, benutzen Sie bitte diesen Link zu unserem Mapserver.
Images: ESA/DLR/FU Berlin, CC BY-SA 3.0 IGO
Copyright Notice:
Where expressly stated, images are licenced under the Creative Commons Attribution-ShareAlike 3.0 IGO (CC BY-SA 3.0 IGO) licence. The user is allowed to reproduce, distribute, adapt, translate and publicly perform it, without explicit permission, provided that the content is accompanied by an acknowledgement that the source is credited as 'ESA/DLR/FU Berlin', a direct link to the licence text is provided and that it is clearly indicated if changes were made to the original content. Adaptation / translation / derivatives must be distributed under the same licence terms as this publication.
Die High Resolution Stereo Camera wurde am Deutschen Zentrum für Luft- und Raumfahrt (DLR) entwickelt und in Kooperation mit industriellen Partnern gebaut (EADS Astrium, Lewicki Microelectronic GmbH und Jena-Optronik GmbH). Das Wissenschaftsteam unter Leitung des Principal Investigators (PI) Dr. Daniela Tirsch besteht aus 50 Co-Investigatoren, die aus 34 Institutionen und 11 Nationen stammen. Die Kamera wird vom DLR-Institut für Planetenforschung in Berlin-Adlershof betrieben.