Department of Earth Sciences
Service Navigation
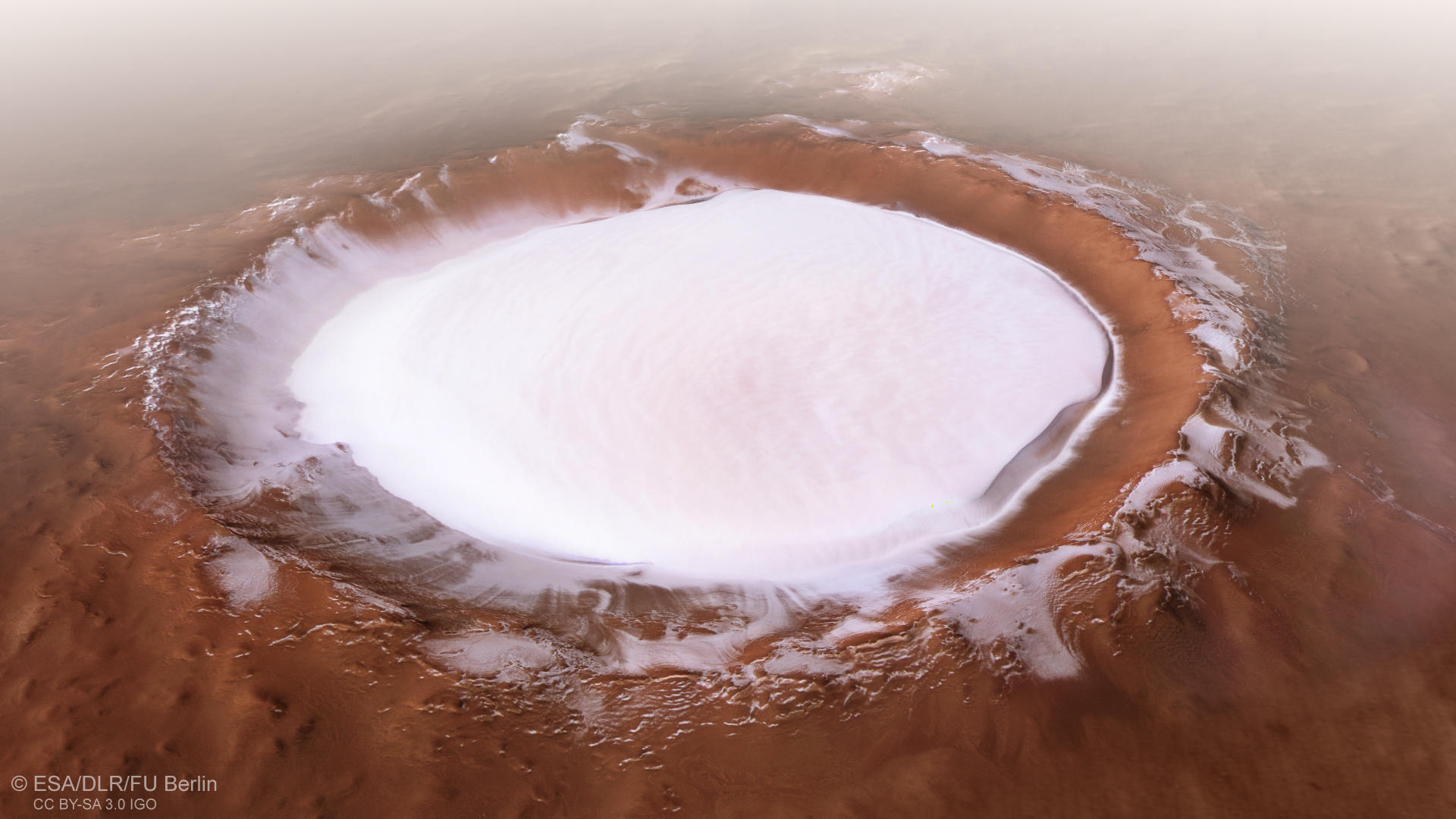
Winter wonderland in red and white
This colorful red and white mosaic made from images of the High Resolution Stereo Camera (HRSC) on board ESA’s Mars Express mission pictures the well-preserved Korolev crater on Mars, which is filled with water ice all year round.
ESA’s Mars Express mission launched on 2 June 2003, and reached Mars six months later. The satellite fired its main engine and entered orbit around the Red Planet on 25 December, making this month the 15-year anniversary of the spacecraft’s orbit insertion and the beginning of its science programme.
» Read more about Korolev Crater in the main article (below the gallery) ...
Korolev Crater • Views

HRSC color mosaic
Image Credit: ESA/DLR/FU Berlin

HRSC color-coded terrain model
Image Credit: ESA/DLR/FU Berlin
Korolev Crater • Location and Schematic

context map
Image Credit: MOLA Science Team/FU Berlin

idea of ice deposition in craters
1 - ice deposition in winter,
2 - situation in spring,
3 - the crater as cold trap during summer
Winter wonderland in red and white
» Read more about Korolev Crater on Mars
The 82-kilometer-diameter crater Korolev was named after Sergei Pavlovich Korolev (1907-1966), the chief constructor and father of Russian space technology. Engineer Korolev developed the first Russian intercontinental rocket R7, the precursor of the modern Soyuz rockets that are still operated today. With his rocket and spacecraft design, Korolev was responsible for the first man-made satellite of Earth Sputnik in 1957, and for the first human spaceflight of Yuri Gagarin in 1961.
The impact crater Korolev is situated in the northern lowlands of Mars, south of the large dune field Olympia Undae that surrounds part of the north polar cap. Korolev’s crater floor lies two kilometer below its rim, and is covered whole year round with a large central mound of water ice. This 1.8-kilometer-thick domed deposit represents a large reservoir of non-polar ice on Mars.
Water ice is permanently stable within Korolev crater because the deepest part of this depression acts as a natural cold trap. The air above the ice cools and is thus heavier compared to the surrounding air. Since air is a poor conductor of heat, the ice is shielded from the surrounding. Only minor warm-up due to heat transfer will happen, and the cold air protects the ice mound effectively from heating and sublimation.
The northern rim of Korolev crater was also imaged by the CaSSIS camera on board ExoMars as one of the first places on Mars on 15 April 2018, only some days after HRSC recorded the crater in orbit 18042. ExoMars is an ESA space program dedicated to the search of life on Mars. It consists of two parts: the ExoMars 2016 mission brought the Trace Gas Orbiter into a Mars orbit in 2016, but failed to deliver successfully the landing module Schiaparelli to the surface of Mars. For the near future, the ExoMars 2020 mission is planned, comprising a surface platform and a rover that should land in Oxia Planum, at the dichotomy boundary of Mars in 2021.
High Resolution Stereo Camera (HRSC)
» Information to image origin and processing
The mosaic consists of five orbit strips (18042, 5726, 5692, 5654, 1412) and covers a region 161.8° - 168.0° East and 71.7° - 73.8° North. Orbit 18042 was captured on 4 April 2018. The resolution of the color mosaic is approximately 21 meters per pixel. The color mosaic was created using data from the nadir channels, the fields of view which are aligned perpendicular to the surface of Mars, and the color channels of the HRSC. The oblique perspective view was generated from the digital terrain model, the nadir and color channels of HRSC. The color-coded topographic view is based on a digital terrain model (DTM) of the region, from which the topography of the landscape can be derived. The reference body for the HRSC DTM is a Mars sphere.
The systematic processing of the camera data took place at the DLR Institute for Planetary Research in Berlin-Adlershof. The working group of Planetary Science and Remote Sensing at Freie Universität Berlin used the data to create the image products shown here.
Images: ESA/DLR/FU Berlin, CC BY-SA 3.0 IGO
Copyright Notice:
Where expressly stated, images are licenced under the Creative Commons Attribution-ShareAlike 3.0 IGO (CC BY-SA 3.0 IGO) licence. The user is allowed to reproduce, distribute, adapt, translate and publicly perform it, without explicit permission, provided that the content is accompanied by an acknowledgement that the source is credited as 'ESA/DLR/FU Berlin', a direct link to the licence text is provided and that it is clearly indicated if changes were made to the original content. Adaptation / translation / derivatives must be distributed under the same licence terms as this publication.
The High Resolution Stereo Camera was developed at the German Aerospace Center (DLR) and built in collaboration with partners in industry (EADS Astrium, Lewicki Microelectronic GmbH and Jena-Optronik GmbH). The science team, which is headed by Principal Investigator (PI) Prof. Dr. Ralf Jaumann, consists of 52 co-investigators from 34 institutions and 11 countries. The camera is operated by the DLR Institute of Planetary Research in Berlin-Adlershof.