The Nirgal Vallis river valley on Mars
A long time ago, flowing water shaped the landscape displayed in these images of the High Resolution Stereo Camera (HRSC). HRSC is a camera experiment that was developed and is operated by the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR), and mounted on board the ESA Mars Express mission, orbiting Mars since 2003.
» Read more about Nirgal Vallis in the main article and below the gallery
Nirgal Vallis • Images

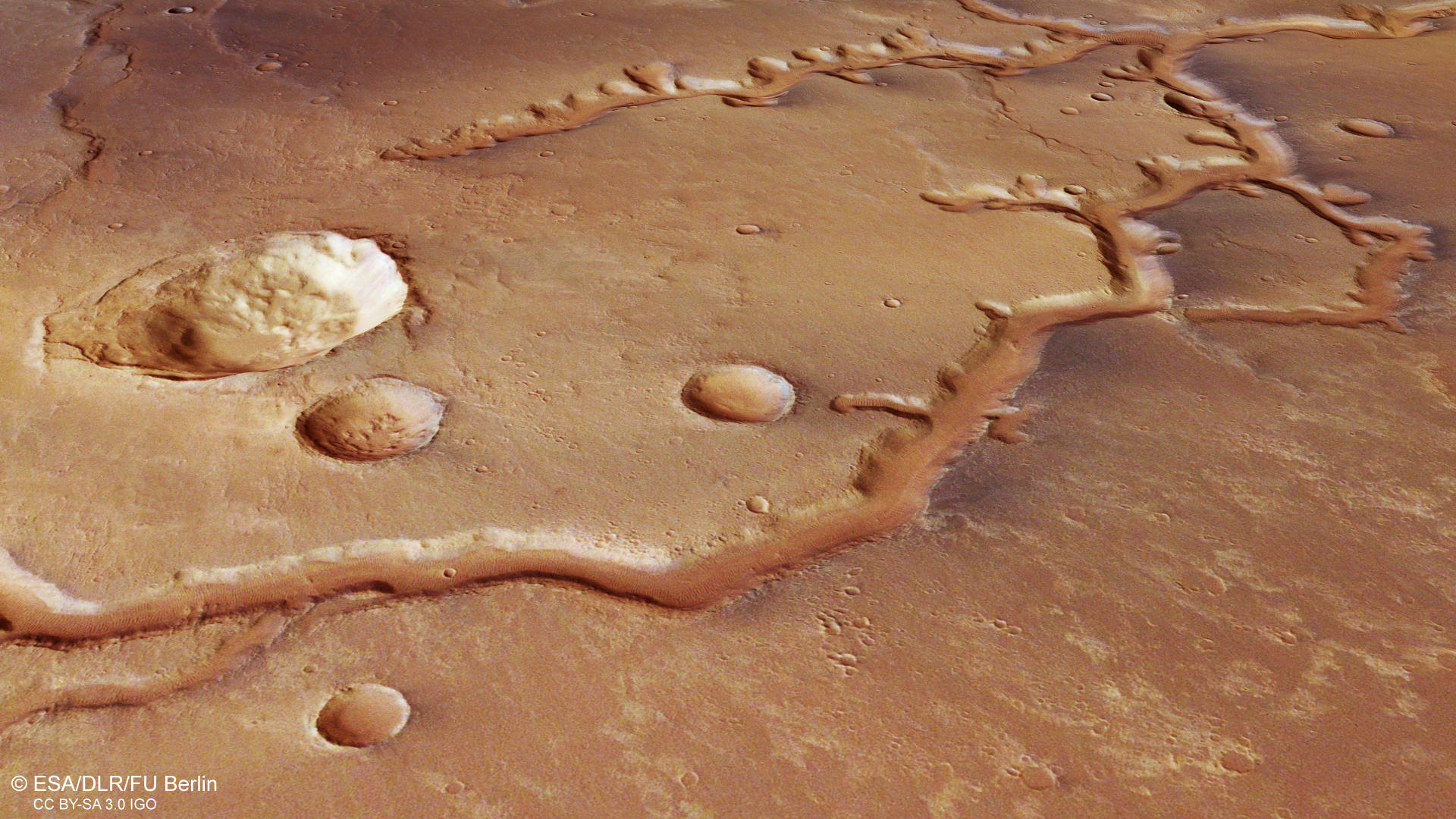
HRSC color image
Image Credit: ESA/DLR/FU Berlin

HRSC color-coded terrain model
Image Credit: ESA/DLR/FU Berlin

HRSC anaglyph
Image Credit: ESA/DLR/FU Berlin
Nirgal Vallis • Location

context map
Image Credit: MOLA Science Team/FU Berlin
The Nirgal Vallis river valley on Mars
» Read more about river formation on Mars
Nirgal Vallis is the relict of a stream that once flowed over the surface of Mars. It is a typical example of an amphitheater-headed valley, characterized by steep-sided valley walls, smooth valley floors, and U-shaped cross sections. This kind of valleys has short tributaries with semi-circular head terminations. Examples on Earth include valleys in the Atacama Desert in Chile, on the Colorado Plateau, and on the Hawaiian islands. Apart from Nirgal Valles, Nanedi Valles and Echus Chasma headwater region are prominent examples of amphitheater-headed valleys on Mars.
The nearly 700 kilometers long Nirgal Vallis with its tributaries dissects old volcanic plains, lava flows, and eolian deposits. The east-west orientation of the main valley follows a regional trend of tectonic features seen also in the nearby Valles Marineris canyon system. The flat valley floor of Nirgal Vallis is widely covered by transverse dunes, which indicate wind directions more or less parallel to the valley walls. The images shown here cover the upstream reach of Nirgal Vallis, which is about 200 meters deep and about 2 kilometers wide. 400 kilometers farther to the East, the valley opens out into the much larger Uzboi Valles that has presumably been occupied by a lake in the past.
Nirgal Vallis is morphologically similar to terrestrial sapping valleys that form by headward erosion and undercutting triggered by groundwater seepage. The absence of a dendritic valley network feeding the main valley argues against precipitation and overland flow. With the help of scaled sandbox experiments scientists showed that a sapping origin of Nirgal Vallis is a possibility, if it was fed by a groundwater source. Sapping valleys on Earth, attributed to undermining and collapse of the walls by seepage, mostly occur in unconsolidated sediments with a permeable aquifer.
High Resolution Stereo Camera (HRSC)
» Information to image origin and processing
The images were acquired by the HRSC (High Resolution Stereo Camera) on 16 November 2018 during Mars Express Orbit 18818. The ground resolution is approximately 14 meters per pixel and the images are centered at about 315° East and 27° South. The color image was created using data from the nadir channel, the field of view which is aligned perpendicular to the surface of Mars, and the color channels of the HRSC. The oblique perspective view was generated from the digital terrain model, the nadir and color channels of HRSC. The anaglyph, which provides a three-dimensional view of the landscape when viewed using red-green or red-blue glasses, was derived from data acquired by the nadir channel and the stereo channels. The color-coded topographic view is based on a digital terrain model (DTM) of the region, from which the topography of the landscape can be derived. The reference body for the HRSC-DTM is a Mars equipotential surface (Areoid).
The systematic processing of the camera data took place at the DLR Institute for Planetary Research in Berlin-Adlershof. The working group of Planetary Science and Remote Sensing at Freie Universität Berlin used the data to create the image products shown here.
To download released raw images and DTMs of the region in GIS-ready formats, follow this link to the mapserver.
Images: ESA/DLR/FU Berlin, CC BY-SA 3.0 IGO
Copyright Notice:
Where expressly stated, images are licenced under the Creative Commons Attribution-ShareAlike 3.0 IGO (CC BY-SA 3.0 IGO) licence. The user is allowed to reproduce, distribute, adapt, translate and publicly perform it, without explicit permission, provided that the content is accompanied by an acknowledgement that the source is credited as 'ESA/DLR/FU Berlin', a direct link to the licence text is provided and that it is clearly indicated if changes were made to the original content. Adaptation / translation / derivatives must be distributed under the same licence terms as this publication.
The High Resolution Stereo Camera was developed at the German Aerospace Center (DLR) and built in collaboration with partners in industry (EADS Astrium, Lewicki Microelectronic GmbH and Jena-Optronik GmbH). The science team, which is headed by Principal Investigator (PI) Prof. Dr. Ralf Jaumann, consists of 52 co-investigators from 34 institutions and 11 countries. The camera is operated by the DLR Institute of Planetary Research in Berlin-Adlershof.